데브캣스튜디오의 심예람 연구원은 4월 25일 ‘넥슨 개발자 컨퍼런스 2018(NDC 2018)’에서 진행된 강연을 통해 ‘프로젝트DH’의 A·I 내비게이션 시스템을 소개했다. 이 자리에서 심 연구원은 수많은 시행착오 끝에 완성한 자연스런 용의 비행모션 구현 노하우를 털어놨다.

먼저 심 연구원은 ‘프로젝트DH’ 기획자의 요구에 따라 영화와 드라마, 애니메이션, 게임 등 다양한 자료를 통해 용의 비행방식과 모션에 대한 기초 연구를 진행했다. 그 결과 직진, 선회, 스파이럴 등 다양한 모션 구현이 필요하고, 일정한 선회반경과 선회율을 유지한 공중 방향 전환이 핵심이라는 사실을 파악했다. 이에 3차원 패스파인딩 기능, 부드러운 경로 생성, 경로 유형별 애니메이션 구현 등을 위한 A·I 내비게이션 시스템 구축에 돌입했다.
이에 기존 언리얼 엔진 4에 탑재된 내비게이션 시스템을 비롯해 플러그인 형태의 ‘스플라인 패스 팔로잉’, 복셀 기반의 ‘DoN AI 내비게이션’ 등 다양한 참고자료를 검토했다. 이 과정에서 복셀 기반 시스템은 유선형의 생명체 움직임 표현과 방대한 데이터량 감당이 어렵다는 단점에 근거, 스플라인 패스 팔로잉을 활용한 시스템 개발을 최종적으로 결정했다.
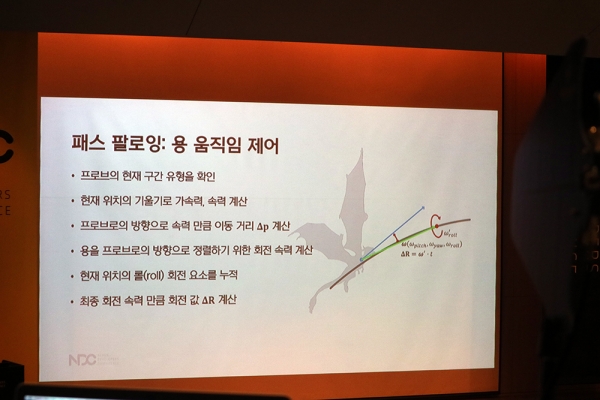
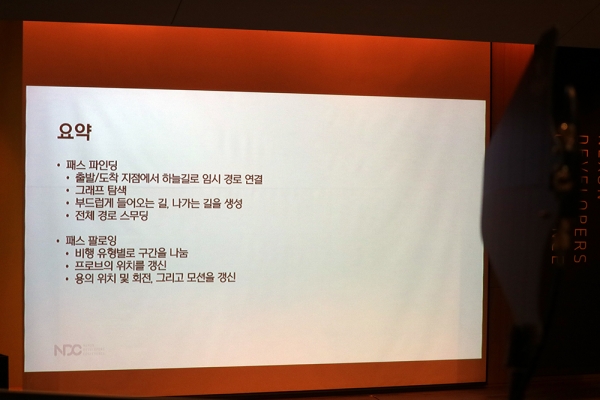
특히 일명 ‘용을 위한 실크로드’로 불린 하늘길 시스템은 스플라인 패스 팔로잉을 기반으로 용의 실제 경로를 생성하며, 부담이 적은 실행 시간과 비용 내에서 자연스러운 경로 구축이 가능하다는 장점이 있다. 여기에 심 연구원은 이동 경로를 미리 선행하는 프로브로 전체 경로 분석 결과를 파악한 뒤, 프로브를 용이 추적하는 형태로 구현했다. 즉, 프로브가 용의 속도와 경로를 제어함으로서, 한층 유연한 패스 팔로잉을 위한 완충장치 역할을 수행하는 것이다.
더불어 A·I 내비게이션의 대상 객체는 움직이는 물체인 경우가 많기 때문에, 타깃의 이동에 따른 경로 재탐색이 중요하다. 이에 ‘프로젝트DH’ 개발팀은 스플라인 경로 위의 적당한 지점을 찾아 이후 경로를 잘라내고 해당 지점 위치와 탄젠트를 유지한 채 패스 파인딩 위치를 목표로 경로를 찾아나가는 A·I 시스템을 구축했다.
이어 심 연구원은 ‘하늘길 시스템’을 게임 내에서 구현하기 위해 언리얼 엔진 4와의 융합에 도전했다. 게임 내 객체를 조작하는 언리얼 엔진 내 AI 콘트롤러를 활용해 MoveTo 요청을 FlyingMoveTo 요청으로 변환하고 ‘하늘길 시스템’을 접목했다. 이후 패스 팔로잉 컴포넌트 요청을 통해 프로브로 용의 패스 팔로잉을 구현하는 것이 가능하다. 다만 그는 “스플라인 경로의 잦은 생성과 파괴로 메모리 영역 부담이 크고, 레이 트레이스나 캡슐 오버랩 테스트가 많아 향후 지속적으로 최적화에 나설 예정”이라고 밝혔다.

데브캣스튜디오 심예람 연구원은 “오랜 기간 A·I 내비게이션 개발이 이어져왔지만, 여전히 시장 내에 실버 불릿은 존재하지 않는다”며, “향후 스플라인 기반의 ‘하늘길 시스템’과 복셀 기반의 A·I 내비게이션 시스템을 결합한 하이브리드 패스 파인딩을 구현하겠다는 목표도 이뤄보고 싶다”고 말했다.
[경향게임스=정우준 기자]